Kreative Eigenbauten
Produktübersicht: Automatische Liquid-Handler und Dispenser
Automatische Liquid-Handler und Dispenser im Überblick
(06.09.2022) Inzwischen können sich auch nicht ganz so gut betuchte Arbeitsgruppen einfache Pipettier-Roboter leisten. Noch mehr Geld lässt sich sparen, wenn man die Geräte selbst herstellt.
Stundenlanges Pipettieren von Hand macht selbst mit leichtgängigen und ergonomischen Pipetten keinen Spaß. Ein eigener Pipettier-Roboter, der zumindest den gröbsten Teil der allerödesten Pipettier-Routinen abnimmt, dürfte bei den meisten akademischen Arbeitsgruppen deshalb ganz oben auf ihrer Wunschliste stehen. Und wenn sie nicht gerade so arm wie Kirchenmäuse sind, können sie sich diesen Wunsch auch erfüllen.
Schon ab etwa 5.000 Euro erhält man inzwischen kleine, auf das Nötigste abgespeckte Pipettier-Automaten, die meist nur mit einem oder zwei Pipettierköpfen sowie wenigen Deck-Plätzen für die Aufnahme von Spitzenboxen oder anderen Zubehör-Modulen ausgestattet sind. Natürlich kann man von diesen einfach strukturierten Instrumenten, die auch in der kleinsten Lücke auf der Bench Platz finden, nicht den Durchsatz oder die Präzision vollausgestatteter Workstations erwarten, die für den Betrieb in Pharma- oder Diagnostiklaboren konzipiert sind. Für die typischen Pipettier-Aufgaben in vielen biowissenschaftlichen Laboren reichen ihr gemächlicheres Tempo und die etwas geringere Genauigkeit aber meist völlig aus.
Freie Hard- und Software
Einige Einstiegsmodelle bieten neben dem moderaten Preis noch einen weiteren Vorteil: Im Gegensatz zu den allermeisten hochpreisigen Pipettier-Robotern sind sowohl ihre Hard- als auch Software frei zugänglich (Open Source) und können beliebig modifiziert werden. Damit eröffnet sich eine riesige Spielwiese für Bastler, die ihre Pipettier-Automaten nach eigenen Bedürfnissen maßschneidern wollen. Die Gruppe des Proteomikers Ryan Kelly von der Brigham Young University, USA, modelte zum Beispiel den Open-Source-Pipettierroboter OT-1 der US-Firma Opentrons in einen Nanoliter-Dispenser um (SLAS Technology 26(3): 311-9). Dazu tauschte Kellys Team den Pipettierkopf des OT-1, der im Wesentlichen aus einer klassischen Pipette besteht, gegen eine 15-Mikroliter-Spritze aus, und fixierte diese mit einer Halterung aus dem 3D-Drucker am Arm des Pipettier-Roboters. Die Auf- und Abbewegung des Spritzenkolbens übernimmt der gleiche Schrittmotor, der in der ursprünglichen Version des OT-1 den Kolben der Pipette bewegt. Kellys modifizierter OT-1 kann Tropfen mit einem Volumen von 15 Nanolitern punktgenau pipettieren. Die Gruppe nutzt ihn zum Beispiel, um Proben, die nur wenige Nanogramm Protein enthalten, in die winzigen Wells eines Analyse-Chips zu übertragen.
Dass der Phantasie bei der Umgestaltung und Anpassung von OT-1 beziehungsweise OT-2 an individuelle Experimente kaum Grenzen gesetzt sind, zeigt auch eine japanische Gruppe. Haruka Ozakis Team an der University of Tsukuba verwendet einen mit wenigen Bauteilen ergänzten OT-2 für Hefe-Spotassays (bioRxiv, doi: 10.1101/2022.07.16.500326). Hefe-Forscher testen mit Spotassays den Effekt von Mutationen auf das Zellwachstum oder die Resistenz gegenüber Wirkstoffen. Dazu pipettieren sie Hefesuspensionen in kleinen Tropfen auf Agar-Platten und vergleichen Wachstum sowie Überlebensfähigkeit der einzelnen Stämme anhand ihrer Zelldichte in gleichgroßen Spots. Die Spots von Hand aufzutragen, ist insbesondere bei vielen Testkandidaten ein mühsames Geschäft. Es lässt sich zwar mit Liquid-Handlern automatisieren, die Roboter sind aber teuer und häufig nicht auf die runden Petrischalen ausgelegt, in denen Spotassays in der Regel durchgeführt werden.
Umbau für Spotassays
Die Japaner fanden einen recht einfachen Weg, mit dem sie den OT-2-Pipettierer an ihre Spotassays anpassen konnten. Wie bei Pipettier-Robotern üblich sind die Aussparungen für das Zubehör auf dem Deck des OT-2 im rechteckigen Format der Society for Biomolecular Screening (SBS) gehalten. Um die runden Petrischalen an dieses anzupassen, entwarf die Gruppe entsprechende Adapter mit runden Öffnungen für die Schalen, die sie mit einem 3D-Drucker herstellte. Damit hatte sie das erste Problem gelöst. Das zweite war aber etwas komplizierter: Der Liquid-Handler sollte die Hefesuspensionen in möglichst gleichmäßigen Spots auf der Agar-Platte auftragen. Dazu muss die Pipettenspitze des Roboters so nah wie möglich an die Oberfläche des Agars herangeführt werden – die Höhe des Agars variiert jedoch in den einzelnen Schalen, weil die Agarlösung von Hand in die Petrischalen gegossen wird. Das Team kam schließlich auf die Idee, die Agarplatten zu wiegen und die jeweilige Höhe des Agars anhand ihres Gewichts zu berechnen. Anschließend mussten die Japaner nur noch die senkrechte Bewegung des Pipettierkopfs in der z-Achse auf die entsprechende Eintauchtiefe programmieren.
Viele DIY-Vorlagen
Mit ein bisschen Geschick kann man einen Pipettier-Roboter oder Dispensier-Automaten aber auch für wenig Geld selbst zusammenschrauben. Entsprechende Vorlagen lieferten zum Beispiel Fabian Barthels vom Institut für Pharmazie und Biochemie der Universität Mainz mit dem Open-Source-Liquid-Handler FINDUS sowie der Däne Kaspar Stoy, der an der Universität Kopenhagen den Pipettierautomaten Evobot konzipierte (siehe hierzu auch das Methoden-Special in LJ 6/2020, Seite 62 - Link). Zu diesen beiden Eigenbauten gesellte sich inzwischen ein weiterer DIY-Liquid-Handler namens OTTO, den David Florian aus Scott Guelchers Gruppe an der Vanderbilt University in Nashville, USA, insbesondere für die automatische Vorbereitung von qPCR-Proben entwarf (Sci.Rep. 10:1363).
OTTO ist wie FINDUS und Evobot als kartesischer Liquid-Handler ausgelegt, dessen Pipettierkopf sich linear auf einem handelsüblichen Schienensystem in allen drei Raumrichtungen bewegen kann. Wie bei Barthels FINDUS ist auch in OTTOs Pipettierkopf eine klassische manuelle Pipette integriert, deren Kolben ein Schrittmotor auf- und abbewegt. OTTOs Konstruktion sieht sehr solide und professionell aus, der Zusammenbau dürfte aber etwas komplizierter sein als bei FINDUS sowie Evobot, und auch die veranschlagten Kosten für das Material von ungefähr 1.500 Euro sind deutlich höher.
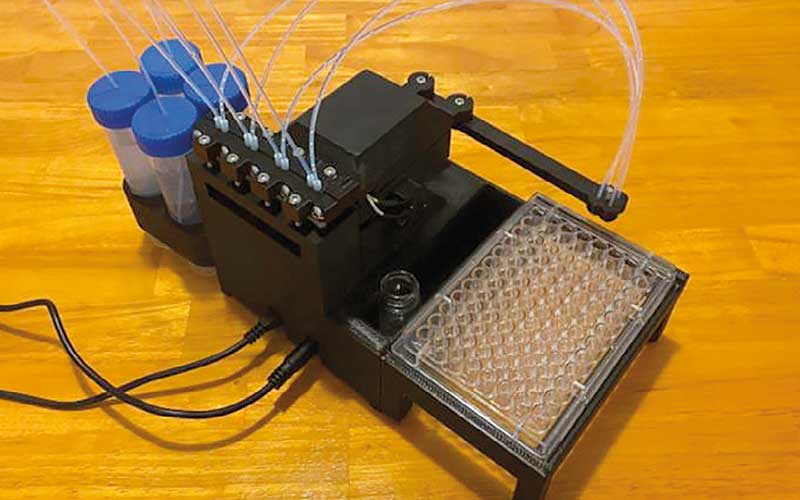
Ganz ohne dreiachsiges kartesisches Schienensystem kommt der automatische Liquid-Dispenser Sidekick aus, den sich Joshua Schriers Team an der Fordham University, USA, ausgedacht hat (HardwareX 12: e00319). Stattdessen bewegt sich der etwa 15 Zentimeter lange Dispensierarm mithilfe eines Gelenksystems aus dem 3D-Drucker mit zwei Freiheitsgraden (2-DOF), das sich Schriers Mannschaft von der Robotik abgeschaut hat.
Das System besteht aus einem L-förmigen Gelenk (als Gelenke dienen jeweils Kugellager), dessen kürzerer, knapp fünf Zentimeter langer Schenkel mit einem Schrittmotor verbunden ist. Der längere, etwa neun Zentimeter lange Schenkel ist über ein Kugellager am Ende des Dispensierarms befestigt. Parallel zu dem langen Schenkel des L-Gelenks verläuft ein zweiter gleichlanger Schenkel, der an einem Ende ebenfalls mit dem Dispensierarm und am anderen mit einem zweiten Schrittmotor verknüpft ist.
Schuhschachtel-Größe
Drehen sich die von einem Microcontroller gesteuerten Schrittmotoren, bewegt sich das Gelenksystem und führt den Dispensierarm sehr präzise über eine Mikrotiterplatte, die unter dem Arm auf einem SBS-konformen, mit dem 3D-Drucker hergestellten Aufnahmetisch des Sidkicks liegt. Vier kleine im Fachhandel erhältliche Elektromagnetpumpen saugen die gewünschten Flüssigkeiten aus Falcon-Tubes an und transportieren sie in kleinen Schläuchen an das Ende des Dispensierarms. Der Sidekick ist nicht viel größer als eine Schuhschachtel und kostet etwa 700 Euro. Einziger Wermutstropfen: Er ist ein reiner Dispenser, der keine Flüssigkeiten aus Wells oder Reaktionsgefäßen entnehmen kann, um sie zum Beispiel in neue Gefäße zu übertragen.
Auf einem völlig anderen Konzept basiert hingegen ein Pipettier-Roboter, der Thole Zuchners Mannschaft an der Hochschule Albstadt-Sigmaringen bei ihren Routinearbeiten unterstützen soll (SLAS Technology doi: 10.1016/j.slast.2022.07.001). Die Forscher besorgten sich einen vierachsigen Roboterarm mit einer Reichweite von 32 Zentimetern, der für etwa 1.500 Euro als kleiner Übungsroboter für Schüler oder Studenten angeboten wird, und möbelten ihn etwas auf. Damit der Arm eine elektronische Pipette greifen und bedienen kann, fertigten die Schwaben mit dem 3D-Drucker einen Pipettenhalter aus Polymilchsäure (PLA) und montierten ihn an die „Hand” des Roboterarms. Die etwas begrenzte Reichweite erhöhten sie mit einer vom Hersteller erhältlichen Schiene, auf der sich der Roboterarm hin und her bewegt.
Für die Programmierung des Roboters nutzten Zuchners Mitarbeiter die mit dem Arm mitgelieferte, sehr leicht zu lernende Software. Nachdem der Roboterarm angelernt war und wusste, was er zu tun beziehungsweise zu pipettieren hatte, musste er in einem Vergleichstest gegen einen geübten Pipettierer aus Zuchners Team antreten. Einen signifikanten Unterschied stellte die Gruppe dabei nicht fest.
Nicht besonders kooperativ
Ein bisschen aufpassen muss man mit Zuchners Roboterarm natürlich schon. Er ist kein kollaborativer Roboter, der mit seinen humanen Kollegen Hand in Hand arbeitet und stoppt, wenn ihm jemand zu nahe kommt. Zuchners Team hat ihn deshalb in einer Sterilbank installiert, in der er ungestört den ganzen Tag pipettieren kann.
Automatische Liquid-Handler und Dispenser im Überblick
(Erstveröffentlichung: H. Zähringer, Laborjournal 9/2022, Stand: August 2022, alle Angaben ohne Gewähr)
Letzte Änderungen: 06.09.2022